Research
My long-term goal is to build the next generation of biologically inspired robots with the focus on improving the strength of robots, endowing them with a wide range of functionalities, and fitting these abilities in small devices in order to enhance their value for defense, surveillance, aerospace, and medical applications. I leverage mechanical and biological principles, smart materials/ artificial muscles, and dynamic simulation and control to guide the design.
Current Research
My doctoral research focuses on design, and control of soft robots with miniature size and multifunction. Such robots fall into the large framework called biologically inspired robotics. I have made contributions to both the design and modeling of biologically inspired robots.
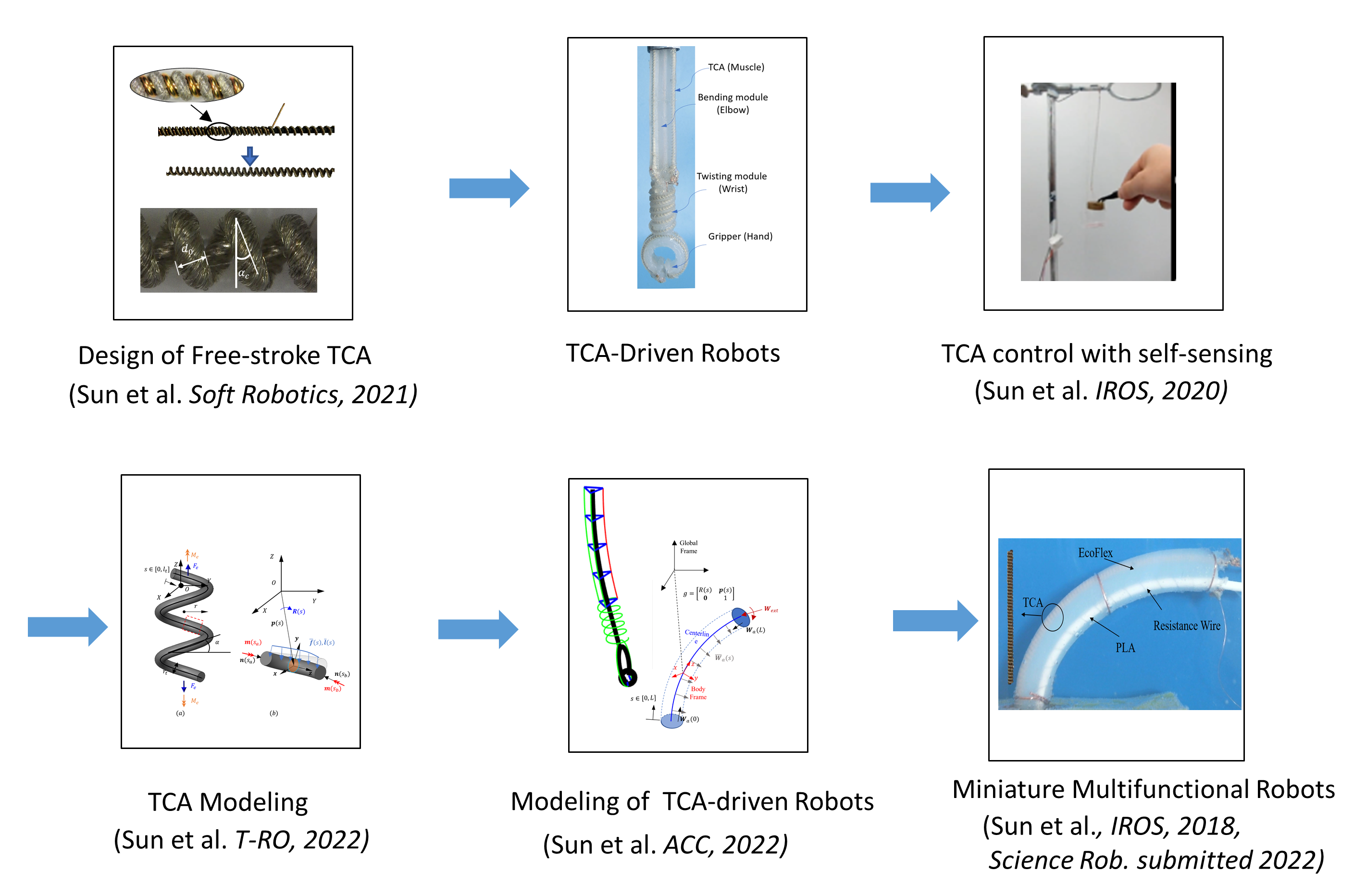
Soft Robots Driven by Twisted-and-Coiled Artificial Muscle:
I have been developing low-cost, strong, and light-weight artificial muscle (twisted and coiled actuators) for use in miniature soft robots. The endeavor includes a novel coil fabrication technique of the artificial muscle, and a robotic arm driven by the artificial muscle that was the world’s first robotic arm driven by the actuator. The robot received wide media coverage such as CSU Source and TechXplor. The related results have been selected as the best student paper finalist (6 from more than 2700 submissions from 62 countries) in the prestigious IROS conference. Physics-based modeling and control methods based on self-sensing are further developed and published on top journals in the field of robotics.
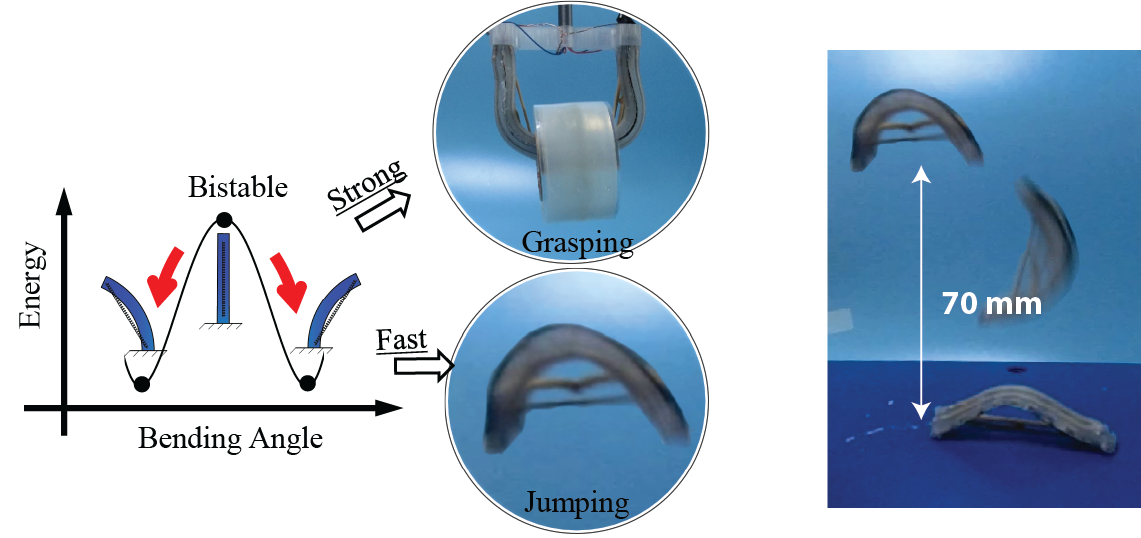
Strong and Fast Soft Robots:
I strived to fit strong performance, such as the strength and speed of soft robots into small robots. Toward this goal, I introduced a novel design principle for exploiting mechanical instability in order to improve the machine’s strength and speed. To this end, I developed several bi-stable soft systems that store and subsequently release energy. A galloping cheetah robot is able to achieve locomotion speeds equal to 2.68 body length per second, swimming robots capable of achieving high speeds underwater, and gripping robots that exhibited over 1 to 1000 stiffness modulation. Related results are published on journal Science Advances and flagship conference ICRA.
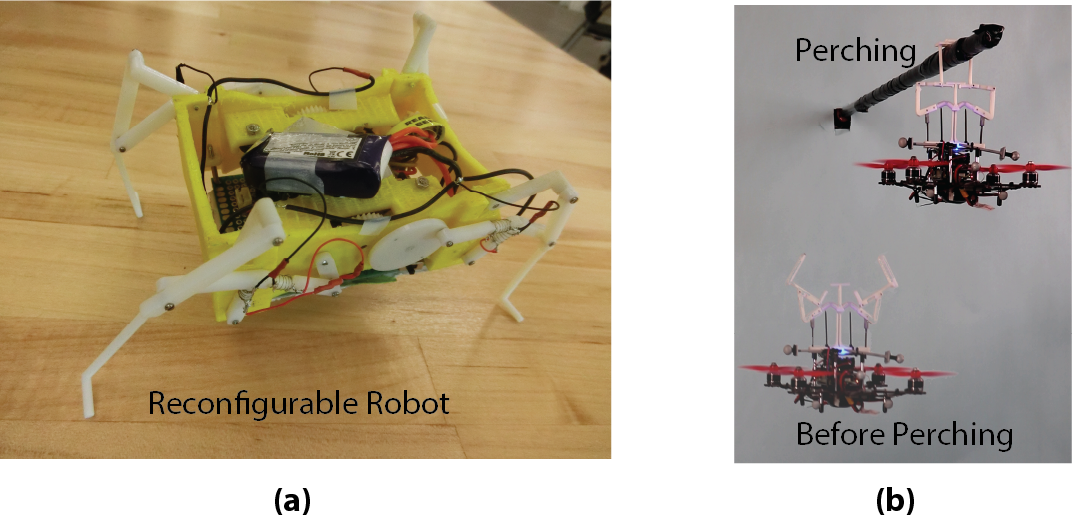
Physically Intelligent Mechanisms for Walking and Flying Robots:
To fit multiple functionalities into small and light-weight robots, I design physically intelligent mechanisms that require minimum control and actuation to realize single/multiple purposes. For example, a land-based tetrapod robot is designed by equipping them with shape-morphing joints enabling them different walking configurations for navigating complex environments without the need for extra motors. A gripper with controllable biostability for aerial robots to perch and grasp is also designed, and it can automatically close when touching an object and automatically release when the robot flying away.